




C/L/U වර්ගයේ ද්විත්ව අක්ෂ සර්වෝ ස්ථානගත කරන්නා
තාක්ෂණික පරාමිතීන්
| C-වර්ගයේ ද්විත්ව-අක්ෂ සර්වෝ ස්ථානගත කරන්නා | L-වර්ගයේ ද්විත්ව-අක්ෂ සර්වෝ ස්ථානගත කරන්නා | U-වර්ගයේ ද්විත්ව-අක්ෂ සර්වෝ ස්ථානගත කරන්නා | |||||||||||
| අන්රක්රමික අංකය | ව්යාපෘති | පරාමිතිය | පරාමිතිය | පරාමිතිය | සටහන් | පරාමිතිය | පරාමිතිය | පරාමිතිය | සටහන් | පරාමිතිය | පරාමිතිය | පරාමිතිය | සටහන් |
| 1 | ශ්රේණිගත කළ බර | කිලෝ 200 |
කිලෝ ග්රෑම් 500 | කිලෝ ග්රෑම් 1000 | දෙවන අක්ෂයේ R400mm/R400mm /R600mm අරය තුළ | කිලෝ ග්රෑම් 500 | කිලෝ ග්රෑම් 1000 | කිලෝ 2000 | දෙවන අක්ෂයේ R400mm/R600mm /R800mm අරය තුළ | කිලෝ ග්රෑම් 1000 | 3000KG බර | 5000KG බර | දෙවන අක්ෂයේ R600mm/R1500mm /R2000mm අරය තුළ |
| 2 | සම්මත ගයිරේෂන් අරය | R400 මි.මී. | R400 මි.මී. | ආර්600මි.මී. |
| R400 මි.මී. | ආර්600මි.මී. | ආර්800 මි.මී. |
| ආර්600මි.මී. | ආර්1500මි.මී. | ආර්2000මි.මී. |
|
| 3 | පළමු අක්ෂය පෙරළීමේ කෝණය | ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
|
| 4 | දෙවන අක්ෂ භ්රමණ කෝණය | ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
|
| 5 | පළමු අක්ෂයේ ශ්රේණිගත කළ උඩු යටිකුරු වේගය | 50°/තත් | 50°/තත් | 15°/තත් |
| 50°/තත් | 50°/තත් | 17°/තත් |
| 17°/තත් | 17°/තත් | 17°/තත් |
|
| 6 | දෙවන අක්ෂයේ ශ්රේණිගත භ්රමණ වේගය | 70°/තත්පර | 70°/තත්පර | 70°/තත්පර |
| 70°/තත්පර | 70°/තත්පර | 17°/තත් |
| 24°/ත | 17°/තත් | 24°/ත |
|
| 7 | නැවත ස්ථානගත කිරීමේ නිරවද්යතාවය | ±0.10මි.මී. | ±0.15 මි.මී. | ±0.20මි.මී. |
| ±0.10මි.මී. | ±0.10මි.මී. | 17°/තත් |
| ±0.15 මි.මී. | ±0.20මි.මී. | ±0.25 මි.මී. |
|
| 8 | විස්ථාපන රාමුවේ මායිම් මානය (දිග×පළල×උස) | 1200mm×600mm ×70mm | 1600mm×800mm ×90mm | 2000mm×1200mm ×90mm |
| - | - | - |
| - | - | - |
|
| 9 | ස්ථාන මාරුකාරකයේ සමස්ත මානය (දිග×පළල×උස) | 2000මි.මී.×1100මි.මී.×1700මි.මී. | 2300mm×1200mm ×1900mm | 2700මි.මී.×1500මි.මී.×2200මි.මී. |
| 1500mm×500mm ×850mm | 2000mm×750mm ×1200mm | 2400mm×900mm ×1600mm |
| 4200මි.මී.×700මි.මී.×1800මි.මී. | 5500mm×900mm ×2200mm | 6500mm×1200mm ×2600mm |
|
| 10 | සම්මත ද්වි-අක්ෂ භ්රමණ තහඩුව | - | - | - | - | Φ800මි.මී. | Φ1200මි.මී. | Φ1500මි.මී. |
| Φ1500මි.මී. | Φ1800මි.මී. | Φ2000මි.මී. |
|
| 11 | පළමු අක්ෂ භ්රමණයේ මධ්ය උස
| 1200 මි.මී. | 1350 මි.මී | 1600 මි.මී. |
| 550 මි.මී | 800 මි.මී. | 1000 මි.මී. |
| 1500 මි.මී. | 1750 මි.මී | 2200 මි.මී. |
|
| 12 | බල සැපයුම් කොන්දේසි | තුන්-අදියර 200V±10%50HZ | තුන්-අදියර 200V±10%50HZ | තුන්-අදියර 200V±10%50HZ | හුදකලා ට්රාන්ස්ෆෝමරය සමඟ | තුන්-අදියර 200V±10%50HZ | තුන්-අදියර 200V±10%50HZ | තුන්-අදියර 200V±10%50HZ | හුදකලා ට්රාන්ස්ෆෝමරය සමඟ | තුන්-අදියර 200V±10%50HZ | තුන්-අදියර 200V±10%50HZ | තුන්-අදියර 200V±10%50HZ | හුදකලා ට්රාන්ස්ෆෝමරය සමඟ |
| 13 | පරිවාරක පන්තිය | H | H | H |
| H | H | H |
| H | H | H |
|
| 14 | උපකරණවල ශුද්ධ බර | කිලෝ 800ක් පමණ | කිලෝග්රෑම් 1300ක් පමණ | කිලෝ 2000ක් පමණ |
| කිලෝ ග්රෑම් 900ක් පමණ | කිලෝ ග්රෑම් 1600ක් පමණ | කිලෝ ග්රෑම් 2500ක් පමණ |
| කිලෝ ග්රෑම් 2200ක් පමණ | කිලෝ ග්රෑම් 4000ක් පමණ | කිලෝ ග්රෑම් 6000ක් පමණ | |
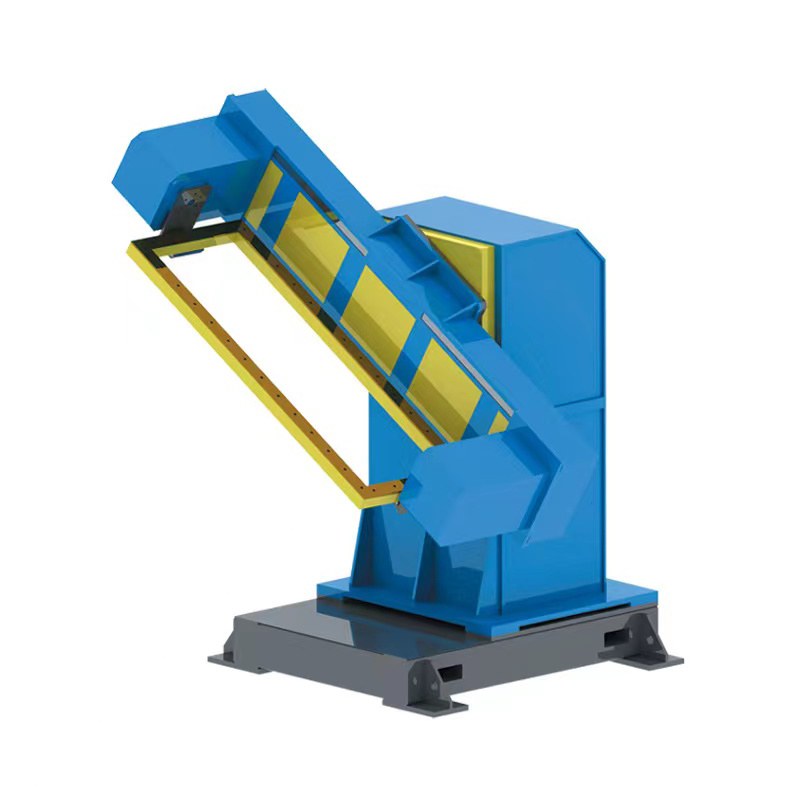
C-වර්ගයේ ද්විත්ව-අක්ෂ සර්වෝ ස්ථානගත කරන්නා
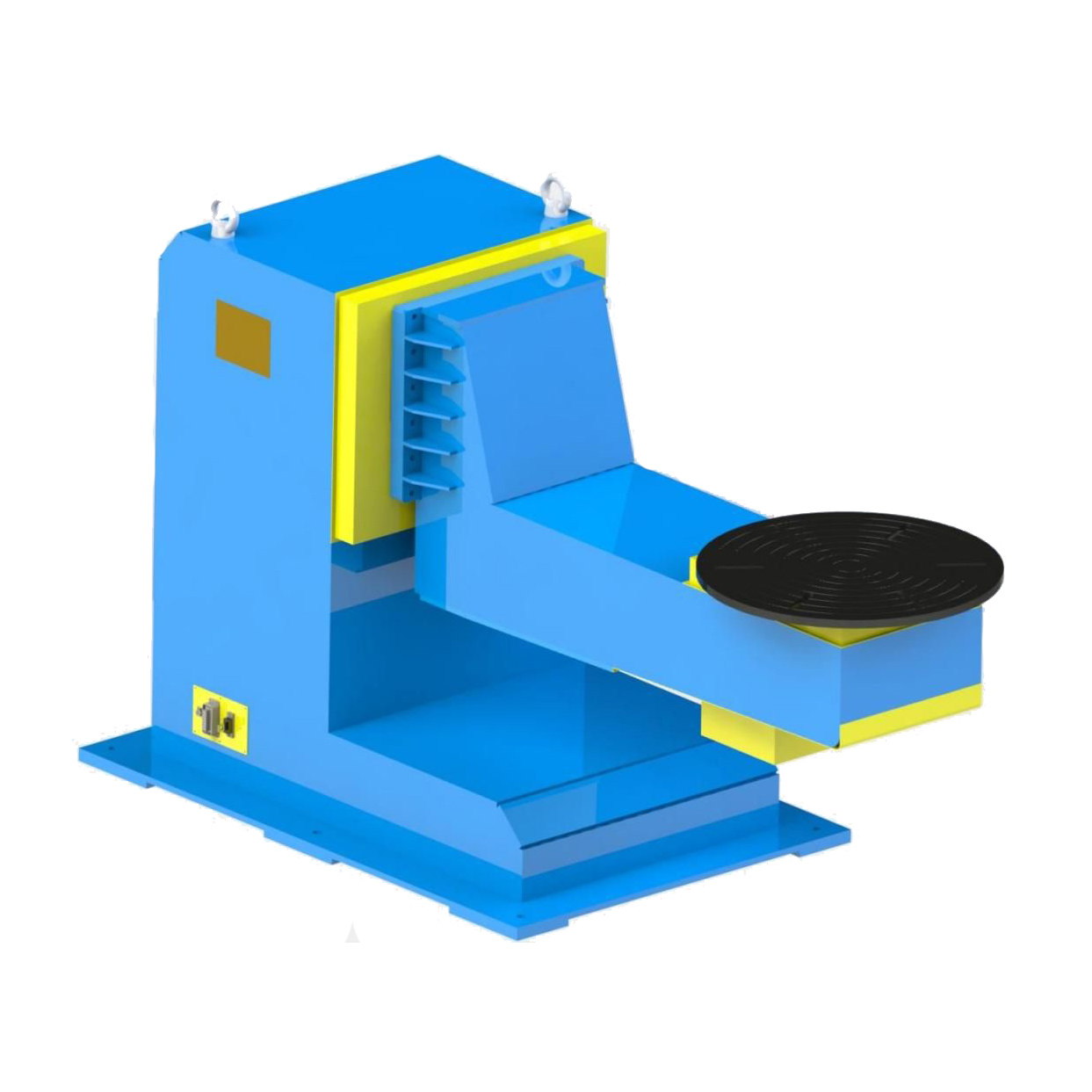
L-වර්ගයේ ද්විත්ව-අක්ෂ සර්වෝ ස්ථානගත කරන්නා

U-වර්ගයේ ද්විත්ව-අක්ෂ සර්වෝ ස්ථානගත කරන්නා
ව්යුහය හැඳින්වීම
ද්විත්ව අක්ෂ සර්වෝ ස්ථානගත කරන්නා ප්රධාන වශයෙන් වෑල්ඩින් කරන ලද අනුකලිත රාමුව, වෙල්ඩින් විස්ථාපන රාමුව, AC සර්වෝ මෝටරය සහ RV නිරවද්යතා අඩු කරන්නා, භ්රමණ ආධාරක, සන්නායක යාන්ත්රණය, ආරක්ෂිත පලිහ සහ විදුලි පාලන පද්ධතියෙන් සමන්විත වේ. වෑල්ඩින් කරන ලද අනුකලිත රාමුව උසස් තත්ත්වයේ පැතිකඩ සමඟ වෑල්ඩින් කර ඇත. ඇනීලිං සහ ආතතිය සමනය කිරීමෙන් පසු, ප්රධාන ස්ථානවල ඉහළ යන්ත්රෝපකරණ නිරවද්යතාවය සහ නිරවද්යතාවය සහතික කිරීම සඳහා වෘත්තීය යන්ත්රෝපකරණ මගින් එය සැකසිය යුතුය. මතුපිට මලකඩ විරෝධී පෙනුමේ තීන්ත ඉසින අතර එය ලස්සන හා ත්යාගශීලී වන අතර පාරිභෝගික අවශ්යතා අනුව වර්ණය අභිරුචිකරණය කළ හැකිය.
වෑල්ඩින් කරන ලද විස්ථාපන රාමුව උසස් තත්ත්වයේ පැතිකඩ වානේ වලින් වෑල්ඩින් කර අච්චු කර වෘත්තීය යන්ත්රෝපකරණ මගින් සැකසිය යුතුය. ස්ථානගත කිරීමේ මෙවලම් සවි කිරීම සඳහා මතුපිට සම්මත ඉස්කුරුප්පු සිදුරු සමඟ යන්ත්රගත කළ යුතු අතර, පින්තාරු කිරීම සහ කළු කිරීම සහ මලකඩ වැළැක්වීමේ ප්රතිකාර සිදු කළ යුතුය.
වෘත්තීය යාන්ත්රික සැකසුම් වලින් පසු භ්රමණ වේදිකාව උසස් තත්ත්වයේ පැතිකඩ වානේ තෝරා ගන්නා අතර, ස්ථානගත කිරීමේ මෙවලම් සවි කිරීම සඳහා මතුපිට සම්මත ඉස්කුරුප්පු සිදුරු සමඟ යන්ත්රගත කර ඇති අතර, කළු වීම සහ මලකඩ වැළැක්වීමේ ප්රතිකාර සිදු කළ යුතුය.
බල යාන්ත්රණය ලෙස AC සර්වෝ මෝටරය සහ RV අඩු කරන්නා තෝරා ගැනීමෙන් භ්රමණ ස්ථායිතාව, ස්ථානගත කිරීමේ නිරවද්යතාවය, දිගු කල්පැවැත්ම සහ අඩු අසාර්ථක අනුපාතය සහතික කළ හැකිය. සන්නායක යාන්ත්රණය පිත්තල වලින් සාදා ඇති අතර එය හොඳ සන්නායක බලපෑමක් ඇති කරයි. සන්නායක පදනම ඒකාබද්ධ පරිවරණයක් භාවිතා කරයි, එමඟින් සර්වෝ මෝටරය, රොබෝ සහ වෙල්ඩින් බල ප්රභවය ඵලදායී ලෙස ආරක්ෂා කළ හැකිය.
ස්ථාවර කාර්ය සාධනයක් සහ අඩු අසාර්ථක අනුපාතයක් සහිතව, ස්ථානගත කරන්නා පාලනය කිරීම සඳහා විද්යුත් පාලන පද්ධතිය ජපන් ඔම්රොන් පීඑල්සී භාවිතා කරයි. භාවිතයේ ගුණාත්මකභාවය සහ ස්ථාවරත්වය සහතික කිරීම සඳහා විදුලි සංරචක දේශීය හා විදේශීය ප්රසිද්ධ වෙළඳ නාම වලින් තෝරා ගනු ලැබේ.











